Hack.init( ) 黑客马拉松
—— Wight · 基于云平台的去线缆化照明系统。
项目仓库:linyuxuanlin / Wight
背景
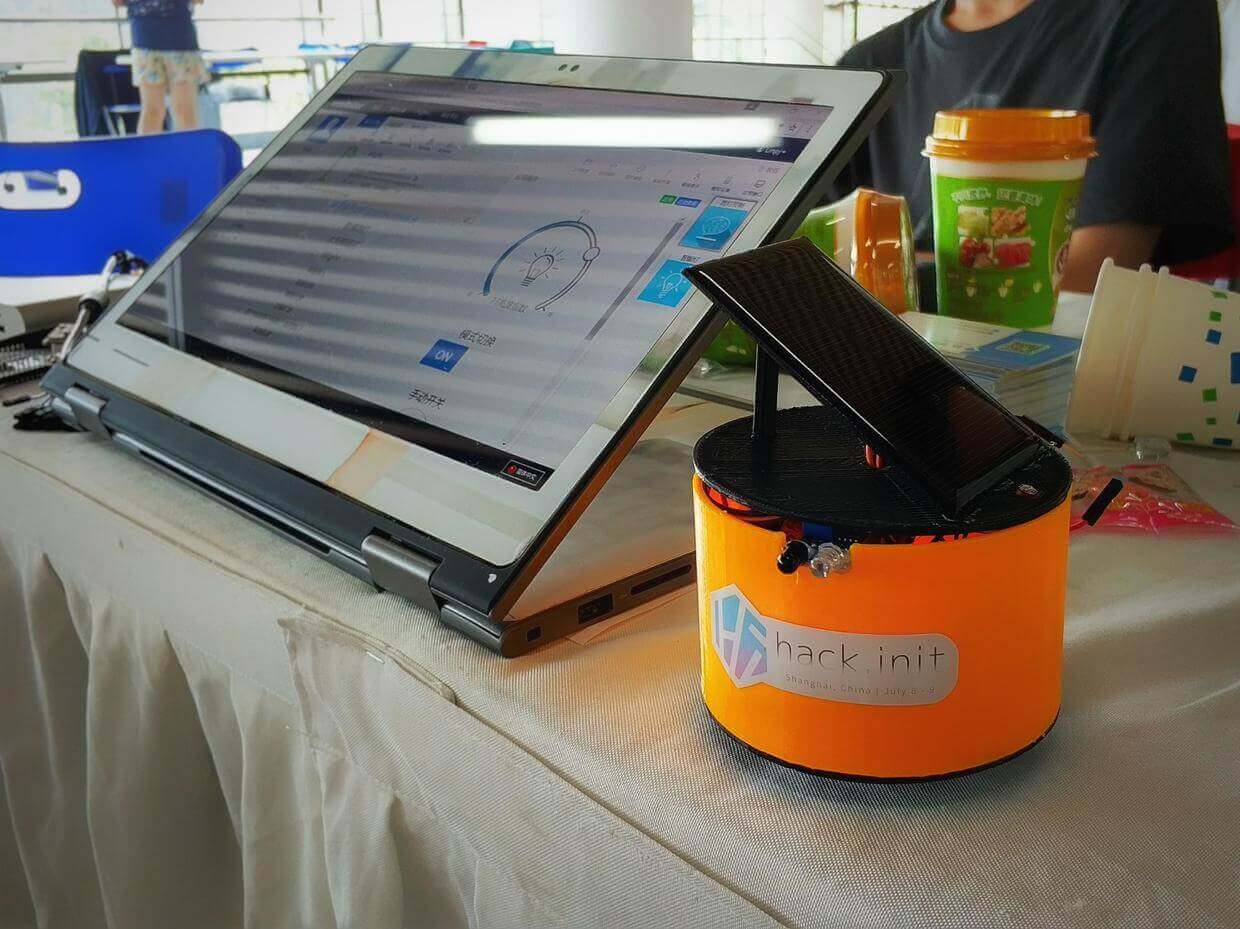
项目制作于 2017 hack.init() 创客马拉松。 20 多个小时的敲代码、建模、调试各种乱七八糟的 bug、等待打印、展示 & 演讲,终于有点成品的样子。
这个项目主要用于乡村偏远地区的路灯照明系统。 模型有点抽象,其实它正扮演的是一杆路灯。
项目创新点
- 太阳能供电。 自给自足(经查阅详细资料,太阳能发电量足以点亮 LED)
- 去线缆化。 为偏远山区不方便铺线缆提供便利
- 智能算法。 检测到夜晚,自动开灯;检测到人或车辆经过,提高 LED 亮度
- 云平台统一控制。 用的是 GSM 主控,可以批量远程调试
- 拓展性。 对个别有自定义照明需求的特殊用户提供各种自定义的功能
原理及实现
代码:
#define BUTTONS_address "channel/widget4_0/cmd/control" //开关命令
#define LIGHT_STATUS_address "channel/widget4_0/data/light"//开关状态
#define ITENSITY_DATA_address "channel/widget4_0/data/lightsensor"
#define LEDPIN1 D1 //定义灯泡控制引脚
#define LEDPIN2 D2
#define LEDPIN3 D3
#define LEDPIN4 D5
#define CHECKIN1 A0
#define CHECKIN2 D4
int autostate = 2;
int light_state = 2;
void buttons_function(uint8_t *payload, uint32_t len)//自动&浇水按钮
{
uint8_t SwitchKey;
uint8_t SwitchKey2;
aJsonClass aJson;
aJsonObject *root = aJson.parse((char *)payload);
if(root == NULL)
{
aJson.deleteItem(root);
return;
}
aJsonObject *_switch = aJson.getObjectItem(root, "mode");
if(_switch != NULL)
{
SwitchKey = atoi(_switch->valuestring);
if(SwitchKey)
{
SerialUSB.println("auto on");
autostate=1;
IntoRobot.publish(LIGHT_STATUS_address,"1");
}
else
{
SerialUSB.println("auto off");
autostate=0;
IntoRobot.publish(LIGHT_STATUS_address,"0");
}
}
aJsonObject *_switch2 = aJson.getObjectItem(root, "manual");
if(_switch2 != NULL)
{
SwitchKey2 = atoi(_switch2->valuestring);
if(SwitchKey2)
{
SerialUSB.println("manual on");
light_state=1;
IntoRobot.publish(LIGHT_STATUS_address,"1");
}
else
{
SerialUSB.println("manual off");
light_state=0;
IntoRobot.publish(LIGHT_STATUS_address,"0");
}
}
else
{
}
aJson.deleteItem(root);
}
void lightup()
{
digitalWrite(LEDPIN1, HIGH); // 打开灯泡
digitalWrite(LEDPIN2, HIGH); // 打开灯泡
digitalWrite(LEDPIN3, HIGH); // 打开灯泡
digitalWrite(LEDPIN4, HIGH); // 打开灯泡
}
void light_half_up()
{
analogWrite(LEDPIN1, 80); // 打开灯泡
analogWrite(LEDPIN2, 80); // 打开灯泡
analogWrite(LEDPIN3, 80); // 打开灯泡
analogWrite(LEDPIN4, 80); // 打开灯泡
}
void lightdown()
{
digitalWrite(LEDPIN1, LOW);
digitalWrite(LEDPIN2, LOW);
digitalWrite(LEDPIN3, LOW);
digitalWrite(LEDPIN4, LOW);
}
int getlight()
{
int k = analogRead(CHECKIN1);
SerialUSB.println(k);
return k;
}
int get_IR_data()
{
int b = digitalRead(CHECKIN2);
SerialUSB.println(b);
return b;
}
void automode()
{
if(getlight()>=400)
{
IntoRobot.publish(LIGHT_STATUS_address,"1");
if (get_IR_data()==0)
lightup();
else
light_half_up();
}
else
{
IntoRobot.publish(LIGHT_STATUS_address,"0");
lightdown();
}
}
void HUMIDITY_print_function(uint8_t *payload, uint32_t len)
{
}
// IntoRobot.publish(LIGHT_STATUS_address,"1");
// IntoRobot.publish(LIGHT_STATUS_address,"0");
void setup()
{
pinMode(D4,INPUT);
SerialUSB.begin(115200);
SerialUSB.println("hello world");
pinMode(LEDPIN1, OUTPUT); //初始化
pinMode(LEDPIN2, OUTPUT); //初始化
pinMode(LEDPIN3, OUTPUT); //初始化
pinMode(LEDPIN4, OUTPUT); //初始化
//设备接收云平台的灯开关命令
IntoRobot.subscribe(BUTTONS_address,NULL,buttons_function);
IntoRobot.subscribe(ITENSITY_DATA_address,NULL,HUMIDITY_print_function);
}
void loop()
{
int a =map(getlight() ,0,1024,100,0);
IntoRobot.publish(LIGHT,a);
SerialUSB.println(getlight());
if(autostate==0)
{
if(light_state ==1)
lightup();
else
lightdown();
}
else if (autostate==1)
{
SerialUSB.println("state=1");
automode();
}
delay(100);
}
因比赛时间所限,只能粗略画出模型,打印出来组装。
FAQ
Q:项目后期还有跟进吗?
A:暂时没有跟进的计划。创新点挺不错,但是否有商业应用价值,还有待验证。
总结
我们在这次比赛中并没有获奖。不过,比赛锻炼了赶代码和路演的能力,也让我提前体验了加班上线的感受,也认识了很多人,收获了好多纪念品。
参考与致谢
- 团队成员:林沛杰,黄岳峰,张梓宜
- IntoRobot 云平台
原文地址:https://wiki-power.com/
本篇文章受 CC BY-NC-SA 4.0 协议保护,转载请注明出处。