RobotCtrl_Power - 电源供电板
项目仓库:linyuxuanlin/RobotCtrl/RobotCtrl_Power
项目在线预览:
注:项目包含于 RobotCtrl - STM32 通用开发套件。
原理图设计
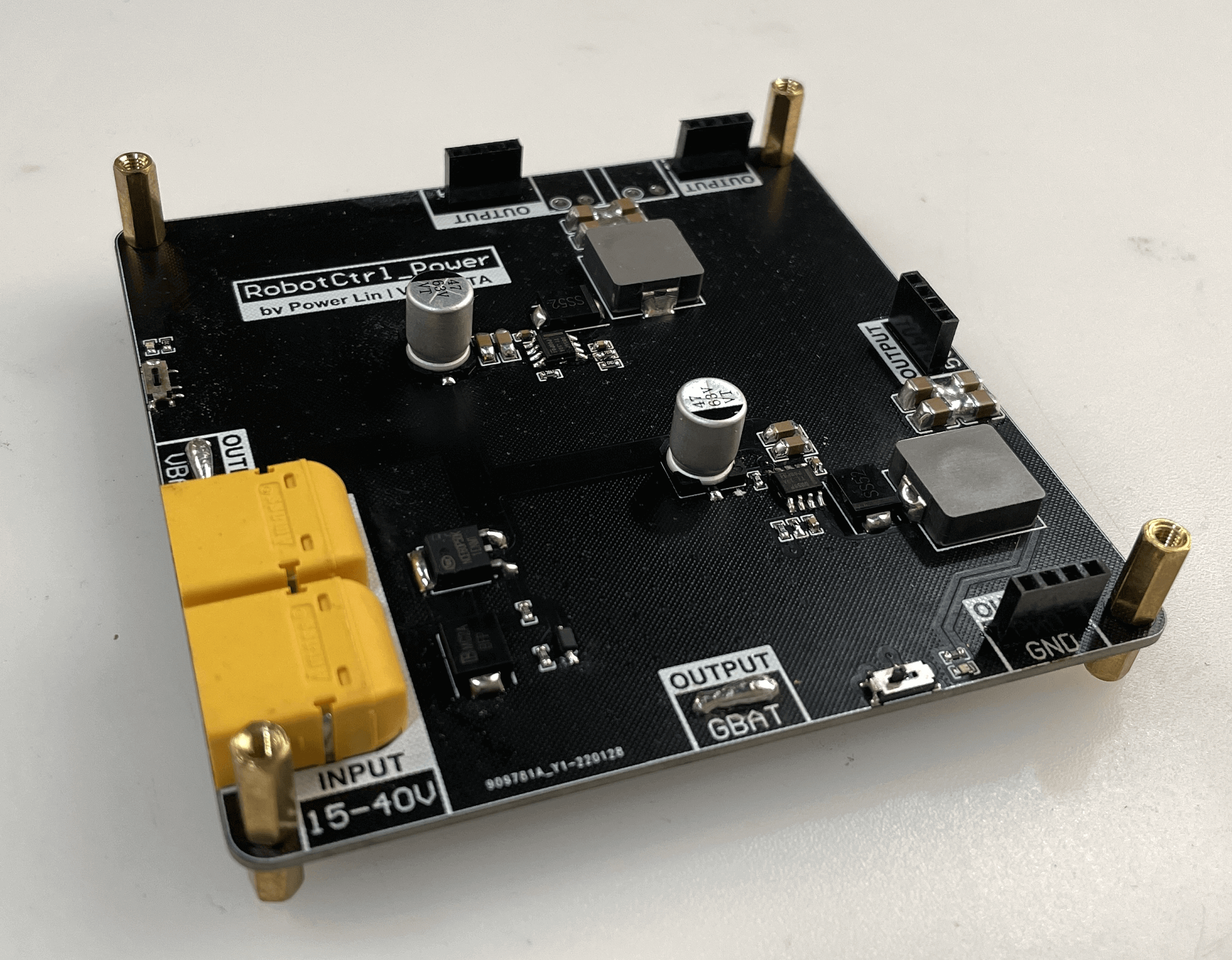
RobotCtrl_Power 的主要功能如下:
- 24V 电源输入(理论可以 15-40V)
- 电池电源转 12V/5A 稳压器(带使能开关与指示灯)
- 电池电源转 5V/5A 稳压器(带使能开关与指示灯)
- 防反接保护(P-MOS)
- 过压保护(大于 30V 开始保护)
- 电池电源输出、12V 电源输出、5V 电源输出接口
电源输入
电源输入选用了两个 XT60PW-M 座子,做双电源备份输入(也可以作为一个输入一个输出使用),并提供两排排针供输出测试。
防反接功能使用 P-MOS 实现,虽然 XT60 是防呆设计,但还是需要防止正负电源线焊反的情况。反接时,P-MOS 不会导通,电源不会灌入系统。防反接功能的设计可参考文章 防反接电路的设计。
瞬时过压保护与 ESD 防护,使用的是 TVS 管,当接入大于 30V 时,它将分走多余的电压保护后置系统。
12V 与 5V 稳压电路
12V 与 5V 稳压电路选用的是两路 TI 的 LMR14050 DC-DC Buck 方案,每一路最高能带 5A 电流。具体设计可参考文章 电源方案(Buck)- LMR14050。
另外,每一路都增加了使能开关和电源指示灯。
电源输出端口
VBAT、12V、5V 输出各自使用一对 4pin 排针,12V 输出额外增加 KF2EDGR-3.81 座子为特殊传感器提供供电。
PCB 设计
RobotCtrl_Power 的 PCB layout,需要注意反馈网络的上下分压电阻需要尽量靠近芯片的 FB 引脚,Vout 采样路径应尽量原理噪声产生路径(电感二极管环路),最好是通过过孔走屏蔽层后的层;电感应该靠近 SW 引脚放置,以降低磁噪声和静电噪声;二极管、输入和输出电容的接地节点应尽可能小,最好是仅在一个点连接到系统阶地层,以最大限度减少系统接地层中的传导噪声;输出电容应尽量靠近电感和二极管的节点放置,且走线尽可能短而粗,以降低传导和辐射噪声,提高效率。
RobotCtrl_Power 的 PCB 顶层和底层走信号和电源,中间插入两层地平面以增强信号与电源完整性。
硬件测试
- 防反接测试:输入电压反接时是否可不开启系统。
- 使能开关与电源指示灯:测试是否可以正常运行。
- 输出:测试 12V/5V 输出是否达标,以及纹波大小。
原文地址:https://wiki-power.com/
本篇文章受 CC BY-NC-SA 4.0 协议保护,转载请注明出处。