تحسين طيارة واحدة
كيفية تحويل طيارة واحدة إلى طيارة مستمرة 360 درجة واستخدام الشيفرة لحل مشكلة الضوضاء؟
الخلفية
عمومًا، تستطيع الطيارة فقط دوران 180 درجة (هناك أيضًا طيارات مستمرة متاحة عبر الإنترنت، لكنها أغلى قليلا). إذا كنت ترغب في استخدام الطيارة كوسيلة لقيادة السيارة الصغيرة، فيمكنك تحويلها إلى طيارة مستمرة.
تحويل الطيارة إلى 360 درجة
1. الاستعداد
الأدوات:
- مفك براغي
- مسدس لصق ساخن
- كباس مائل
2. فتح الطيارة
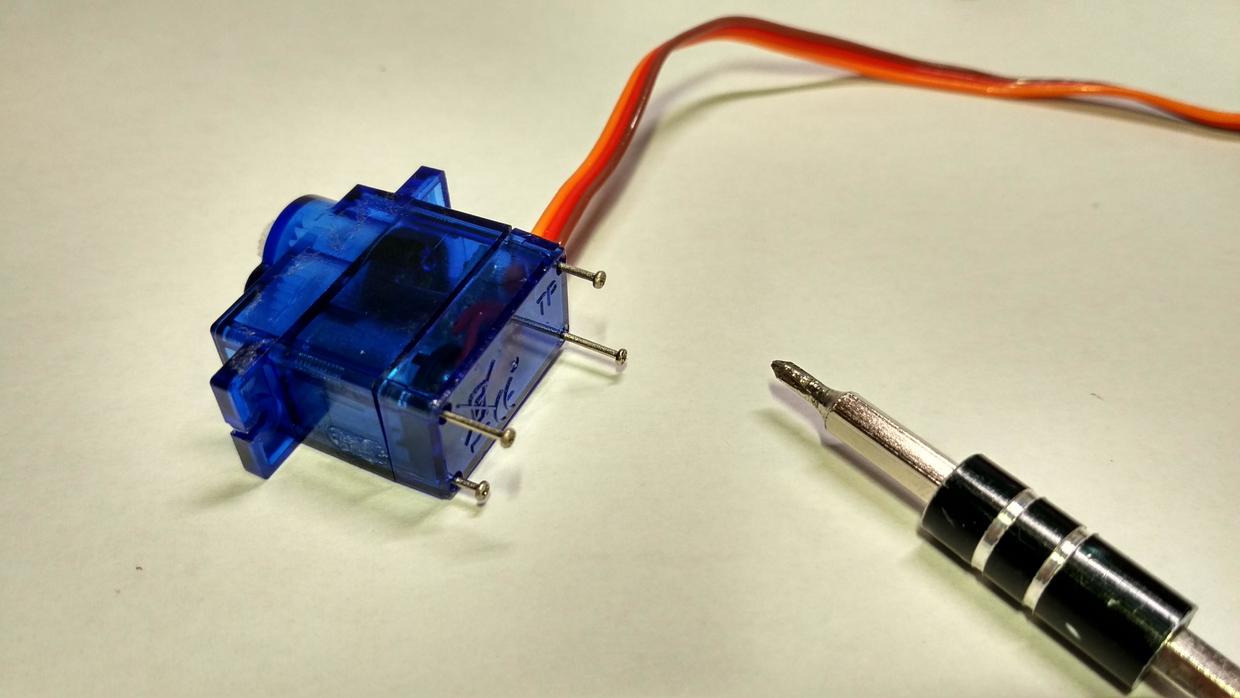
تذكر موقع كل عجلة في هذه المرحلة.

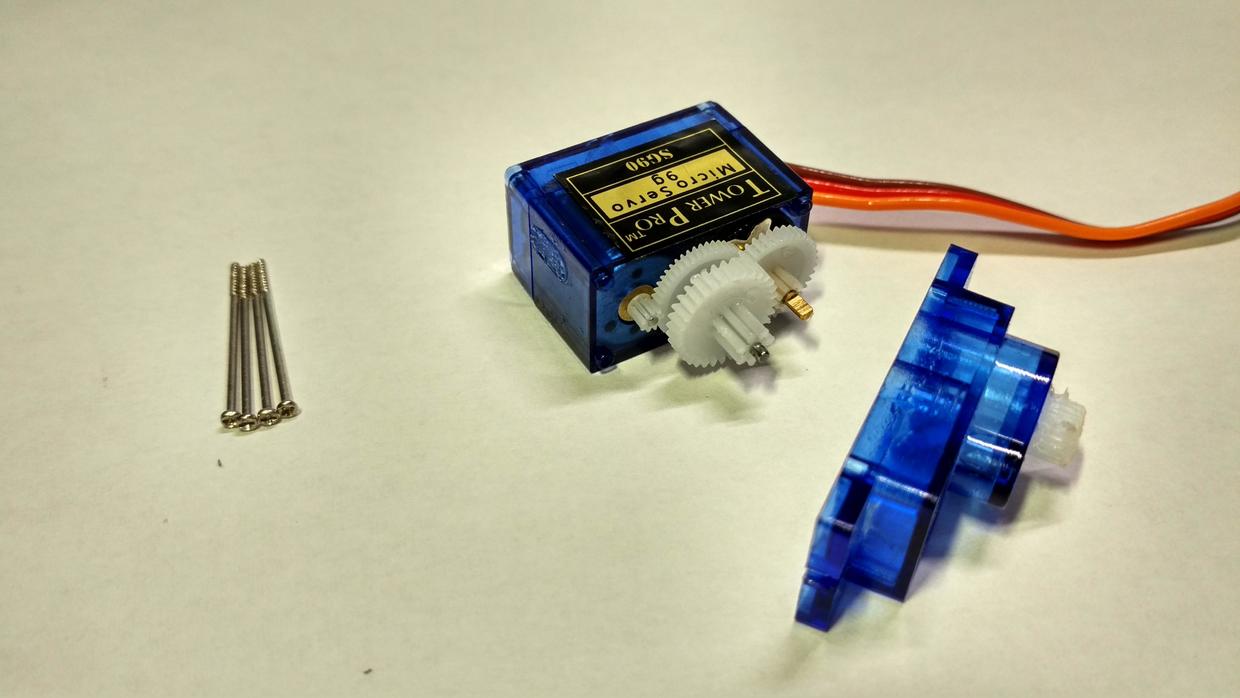
3. تعديل العجلات
قم بفصل أكبر عجلة واقطع المكان المتطاول من الخلف بواسطة الكباس المائل
ابحث عن مفك براغي يكون قطره أكبر بقليل من العمود وقم بتوسيع الفتحة الداخلية للعجلة لتمكين دورانها بحرية حول العمود. 
4. تختيم المتغير الكهربائي
قبل القيام بهذه الخطوة، يجب أن نعيد الطيارة إلى الوضع الأوسط.
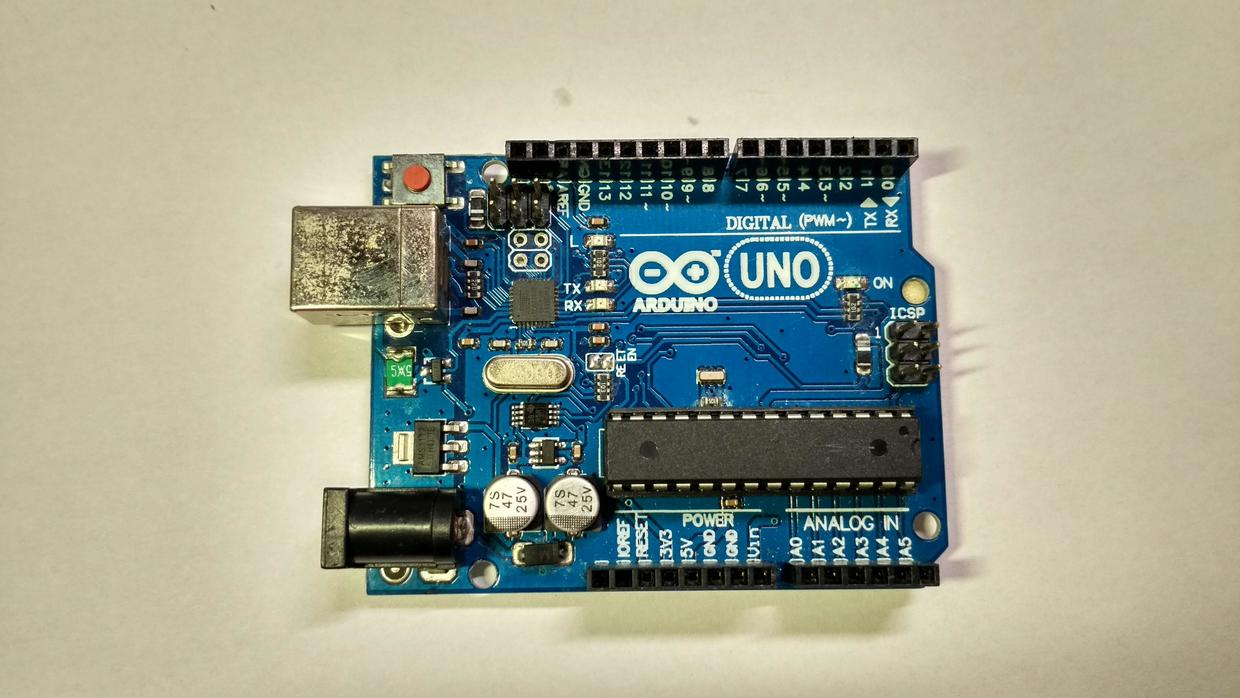
احصل على لوحة Arduino وقم بتنزيل برنامج لإعادة الطيارة إلى الوضع الأوسط:
// بواسطة Lin
#include <Servo.h>
Servo myservo;
void setup() {
myservo.attach(9);// الطيارة متصلة بمنفذ 9 في Arduino
}
void loop() {
myservo.write(90); // إعادة الطيارة إلى الوضع الأوسط
}
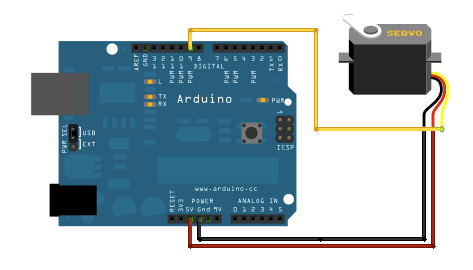
كما هو موضح، قم بتوصيل الطيارة وستجد أنها تدور بشكل مستمر.
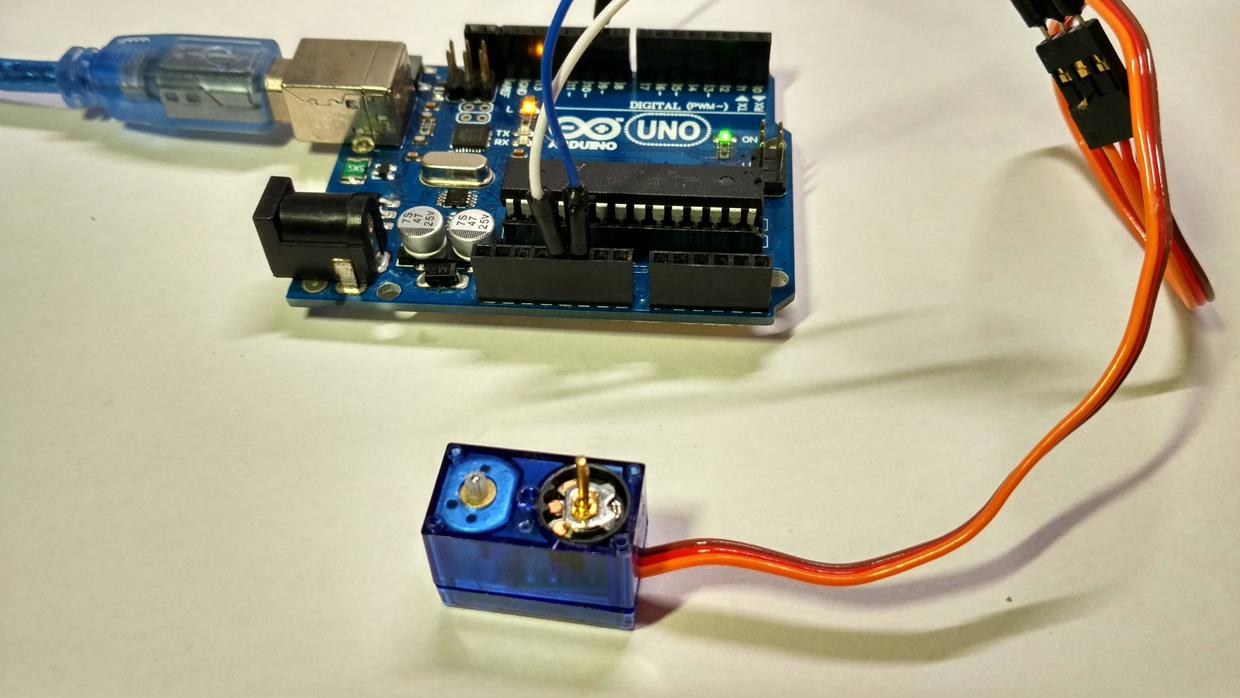
حرك العمود الأيمن ذهابًا وإيابًا عدة مرات حتى تجد موقفًا يتوقف فيه المحرك (قم بضبط المتغير الكهربائي إلى الوسط). 
قم بلصق المتغير الكهربائي بشكل جيد. يجب أن تكون حذرًا لعدم دفع العمود بغير قصد، إذا حدث ذلك، ستحتاج إلى العودة إلى الخطوة الثالثة مرة أخرى.
5. التجميع

قم بتجميع العجلات مرة أخرى، وتأكد من عدم الخلط بين مواقع العجلات. ربط البراغي، وسوف تحصل على طيارة مستمرة 360 درجة.
6. الضبط
قم بتنزيل الشيفرة التالية:
#include <Servo.h>
Servo myservo;
int pos = 0;
void setup() {
myservo.attach(9);
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) {
// بخطوات درجة واحدة
myservo.write(pos);
delay(15);
}
for (pos = 180; pos >= 0; pos -= 1) {
myservo.write(pos);
delay(15);
}
}
حالة المحرك: تسارع المحرك - تباطؤ - تسارع عكسي - تباطؤ...
القضاء على الضوضاء
الخلفية
عند استخدام المحركات في صنع أجهزة الإنترنت الأشياء ذات الصلة، يتعين التعامل كثيرًا مع مشكلة حيث يصل المحرك إلى الموقع المستهدف ولكنه يصدر ضوضاء مزعجة. للتغلب على هذه المشكلة، أقترح @زهراء عبد الله استخدام ريلاي متصل بدائرة الطاقة للمحرك حينما لا يكون هناك حاجة لتشغيل المحرك، مع استخدام الأردوينو للتحكم في تشغيل وإيقاف الريلاي. ومع ذلك، يمكن أن يزيد هذا الحلا من تكلفة الأجهزة وتعقيد الشفرة.
الحلا
عندما يكون هناك حاجة لتشغيل المحرك، استخدم وظيفة attach() ثم بعد انتهاء العملية، استخدم وظيفة detach().
{
servo.attach(9);
servo.write(pos);
delay(250);
// قطع اتصال المحرك لتجنب إصدار الأصوات
servo.detach();
}
الأسئلة الشائعة
س: ماذا إذا كان المحرك من نوع آخر مع هياكل مختلفة مما هو مذكور في الكود؟
ج: يمكنك الاطلاع على المقالة التالية لمعرفة كيفية تعديل المحرك ليصبح قادرًا على الدوران المستمر: تعديل المحرك للدوران المستمر
المراجع والشكر
- استفسارات إضافية حول استخدام المحركات
- حلاً بسيطًا للتخلص من الضوضاء الصادرة عن المحرك
- تعديل المحرك ليصبح قادرًا على الدوران المستمر
- تعرّف على المحركات: دليل للهواة
عنوان النص: https://wiki-power.com/
يتم حماية هذا المقال بموجب اتفاقية CC BY-NC-SA 4.0، يُرجى ذكر المصدر عند إعادة النشر.