ملاحظات تطوير مكتبة HAL - الاتصال عبر I2C (MPU6050)
في هذا المقال، سنتناول كيفية الاتصال عبر I2C باستخدام وحدة MPU6050. سنستخدم مجموعة تطوير RobotCtrl المخصصة، مع نواة الميكروكنترولر STM32F407ZET6. للمزيد من التفاصيل حول الرسومات البيانية والشرح المفصل لمجموعة التطوير، يُرجى الاطلاع على RobotCtrl - STM32 通用开发套件.
المبادئ الأساسية
الاتصال عبر I2C
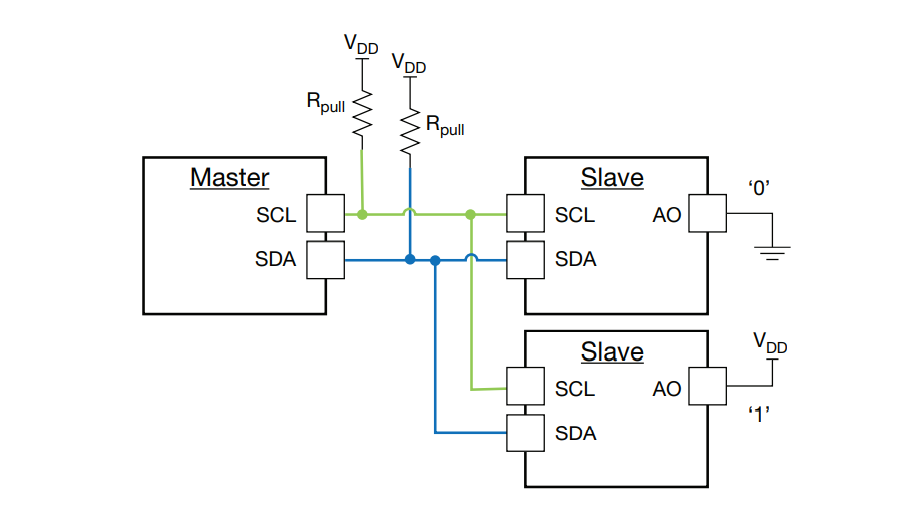
يمكنك قراءة المزيد حول المبادئ الأساسية للاتصال عبر I2C من خلال الرابط 通信协议 - I2C.
وحدة MPU6050
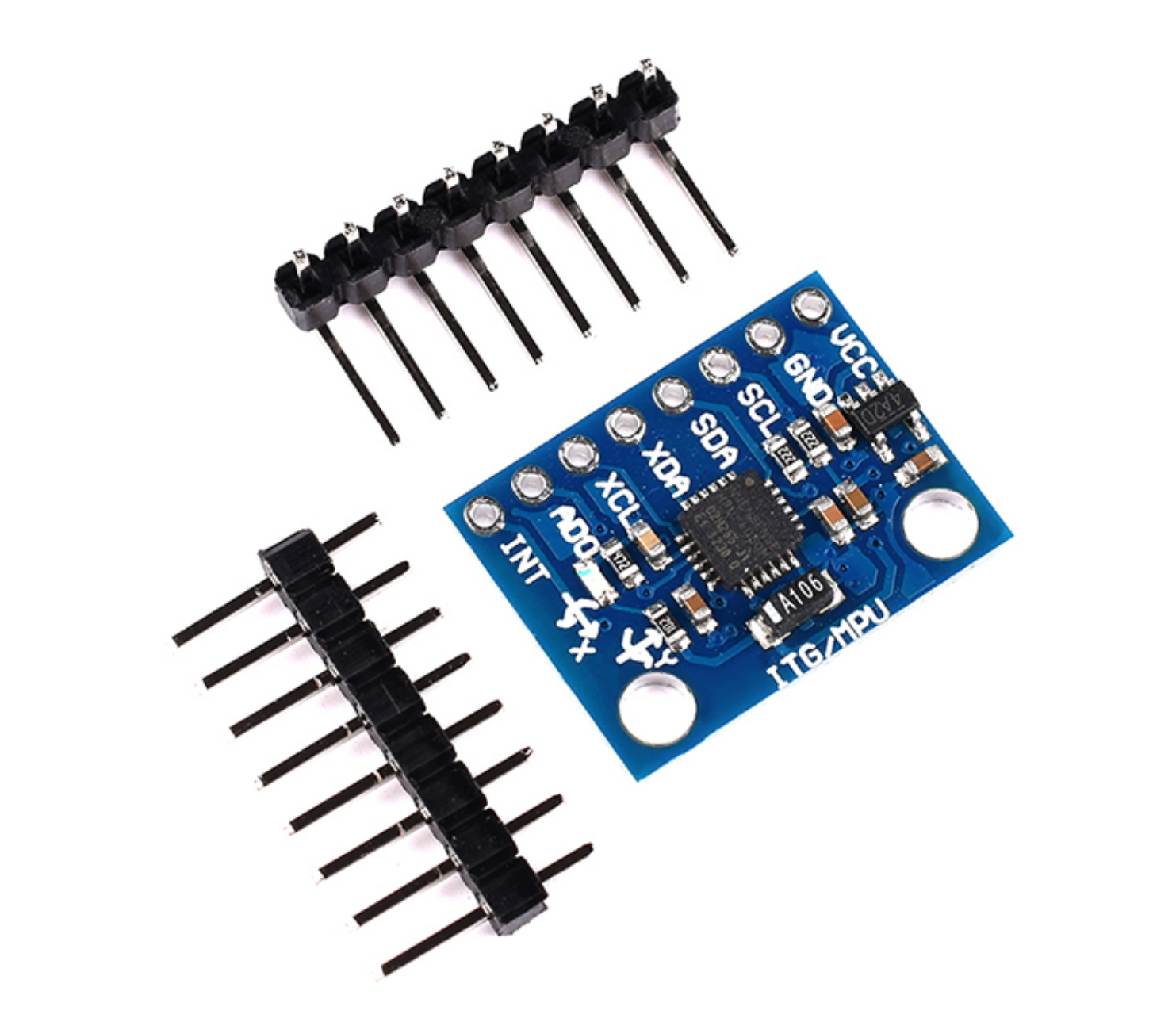
تحديد دبابيس الوحدة:
- VCC: 3.3V~5V
- GND: الأرضية
- SCL: ساعة I2C / ساعة SPI
- SDA: بيانات I2C / مدخلات بيانات SPI
- XDA: توفير ساعة رئيسية لجهاز I2C
- AD0: بت اختيار عنوان جهاز I2C / مخرجات بيانات SPI
- INT: دبوس التوقف
مكتبة MPU6050 مع تصفية كالمان
هنا، سنستخدم مكتبة MPU6050 التي تحتوي على تصفية كالمان. يمكنك العثور على هذه المكتبة في الرابط التالي: leech001/MPU6050. قم بنسخ الملفات mpu6050.c و mpu6050.h التي تم تنزيلها إلى مجلد المشروع الخاص بك، وقم بإضافتها إلى المشروع الخاص بك في بيئة التطوير STM32CubeIDE أو Keil:
#ifndef INC_GY521_H_
#define INC_GY521_H_
#endif /* INC_GY521_H_ */
#include <stdint.h>
#include "i2c.h"
// هيكل MPU6050
typedef struct
{
int16_t Accel_X_RAW;
int16_t Accel_Y_RAW;
int16_t Accel_Z_RAW;
double Ax;
double Ay;
double Az;
int16_t Gyro_X_RAW;
int16_t Gyro_Y_RAW;
int16_t Gyro_Z_RAW;
double Gx;
double Gy;
double Gz;
float Temperature;
double KalmanAngleX;
double KalmanAngleY;
} MPU6050_t;
// هيكل كالمان
typedef struct
{
double Q_angle;
double Q_bias;
double R_measure;
double angle;
double bias;
double P[2][2];
} Kalman_t;
uint8_t MPU6050_Init(I2C_HandleTypeDef *I2Cx);
void MPU6050_Read_Accel(I2C_HandleTypeDef *I2Cx, MPU6050_t *DataStruct);
void MPU6050_Read_Gyro(I2C_HandleTypeDef *I2Cx, MPU6050_t *DataStruct);
void MPU6050_Read_Temp(I2C_HandleTypeDef *I2Cx, MPU6050_t *DataStruct);
Here is the translation of the provided code into Arabic:
#include <math.h>
#include "mpu6050.h"
#define RAD_TO_DEG 57.295779513082320876798154814105
#define WHO_AM_I_REG 0x75
#define PWR_MGMT_1_REG 0x6B
#define SMPLRT_DIV_REG 0x19
#define ACCEL_CONFIG_REG 0x1C
#define ACCEL_XOUT_H_REG 0x3B
#define TEMP_OUT_H_REG 0x41
#define GYRO_CONFIG_REG 0x1B
#define GYRO_XOUT_H_REG 0x43
// إعداد MPU6050
#define MPU6050_ADDR 0xD0
const uint16_t i2c_timeout = 100;
const double Accel_Z_corrector = 14418.0;
uint32_t timer;
Kalman_t KalmanX = {
.Q_angle = 0.001f,
.Q_bias = 0.003f,
.R_measure = 0.03f};
Kalman_t KalmanY = {
.Q_angle = 0.001f,
.Q_bias = 0.003f,
.R_measure = 0.03f,
};
uint8_t MPU6050_Init(I2C_HandleTypeDef *I2Cx)
{
uint8_t check;
uint8_t Data;
// التحقق من هوية الجهاز WHO_AM_I
HAL_I2C_Mem_Read(I2Cx, MPU6050_ADDR, WHO_AM_I_REG, 1, &check, 1, i2c_timeout);
if (check == 104) // سيتم إرجاع 0x68 من قبل المستشعر إذا مرت الأمور بنجاح
{
// سجل إدارة الطاقة 0X6B يجب علينا كتابة الأصفار جميعها لإيقاظ المستشعر
Data = 0;
HAL_I2C_Mem_Write(I2Cx, MPU6050_ADDR, PWR_MGMT_1_REG, 1, &Data, 1, i2c_timeout);
// تعيين معدل البيانات إلى 1 كيلو هرتز عن طريق كتابة سجل SMPLRT_DIV
Data = 0x07;
HAL_I2C_Mem_Write(I2Cx, MPU6050_ADDR, SMPLRT_DIV_REG, 1, &Data, 1, i2c_timeout);
// تعيين تكوين المسرع في سجل ACCEL_CONFIG
// XA_ST=0,YA_ST=0,ZA_ST=0, FS_SEL=0 -> ±2g
Data = 0x00;
HAL_I2C_Mem_Write(I2Cx, MPU6050_ADDR, ACCEL_CONFIG_REG, 1, &Data, 1, i2c_timeout);
I've translated the provided code into Arabic while maintaining the original markdown format.
// ضبط إعدادات الجيروسكوب في مسجل GYRO_CONFIG
// XG_ST=0، YG_ST=0، ZG_ST=0، FS_SEL=0 -> 250 درجة/ثانية
البيانات = 0x00;
HAL_I2C_Mem_Write(I2Cx، MPU6050_ADDR، GYRO_CONFIG_REG، 1، &Data، 1، i2c_timeout);
return 0;
}
return 1;
}
void MPU6050_Read_Accel(I2C_HandleTypeDef *I2Cx، MPU6050_t *DataStruct)
{
uint8_t Rec_Data[6];
// قراءة 6 بايت من البيانات ابتداءً من مسجل ACCEL_XOUT_H
HAL_I2C_Mem_Read(I2Cx، MPU6050_ADDR، ACCEL_XOUT_H_REG، 1، Rec_Data، 6، i2c_timeout);
DataStruct->Accel_X_RAW = (int16_t)(Rec_Data[0] << 8 | Rec_Data[1]);
DataStruct->Accel_Y_RAW = (int16_t)(Rec_Data[2] << 8 | Rec_Data[3]);
DataStruct->Accel_Z_RAW = (int16_t)(Rec_Data[4] << 8 | Rec_Data[5]);
/*** تحويل القيم النقية إلى تسارع بوحدة 'g'
يجب علينا القسمة وفقًا للقيمة الكاملة المحددة في FS_SEL
لقد قمت بتكوين FS_SEL = 0. لذا أنا أقسم على 16384.0
لمزيد من التفاصيل، راجع مسجل ACCEL_CONFIG ****/
DataStruct->Ax = DataStruct->Accel_X_RAW / 16384.0;
DataStruct->Ay = DataStruct->Accel_Y_RAW / 16384.0;
DataStruct->Az = DataStruct->Accel_Z_RAW / Accel_Z_corrector;
}
void MPU6050_Read_Gyro(I2C_HandleTypeDef *I2Cx، MPU6050_t *DataStruct)
{
uint8_t Rec_Data[6];
// قراءة 6 بايت من البيانات ابتداءً من مسجل GYRO_XOUT_H
HAL_I2C_Mem_Read(I2Cx، MPU6050_ADDR، GYRO_XOUT_H_REG، 1، Rec_Data، 6، i2c_timeout);
DataStruct->Gyro_X_RAW = (int16_t)(Rec_Data[0] << 8 | Rec_Data[1]);
DataStruct->Gyro_Y_RAW = (int16_t)(Rec_Data[2] << 8 | Rec_Data[3]);
DataStruct->Gyro_Z_RAW = (int16_t)(Rec_Data[4] << 8 | Rec_Data[5]);
}
/**\* تحويل القيم الخامة إلى درجات في الثانية (درجة/ثانية)
يجب أن نقسم وفقًا لقيمة المدى الكامل المُعينة في FS_SEL
لقد قمت بتكوين FS_SEL = 0. لذا أقوم بالقسمة على 131.0
لمزيد من التفاصيل، انظر إلى تسجيل GYRO_CONFIG \*\***/
DataStruct->Gx = DataStruct->Gyro_X_RAW / 131.0;
DataStruct->Gy = DataStruct->Gyro_Y_RAW / 131.0;
DataStruct->Gz = DataStruct->Gyro_Z_RAW / 131.0;
}
void MPU6050_Read_Temp(I2C_HandleTypeDef *I2Cx, MPU6050_t *DataStruct)
{
uint8_t Rec_Data[2];
int16_t temp;
// قراءة 2 بايت من البيانات بدءًا من مسجل TEMP_OUT_H_REG
HAL_I2C_Mem_Read(I2Cx, MPU6050_ADDR, TEMP_OUT_H_REG, 1, Rec_Data, 2, i2c_timeout);
temp = (int16_t)(Rec_Data[0] << 8 | Rec_Data[1]);
DataStruct->Temperature = (float)((int16_t)temp / (float)340.0 + (float)36.53);
}
void MPU6050_Read_All(I2C_HandleTypeDef *I2Cx, MPU6050_t *DataStruct)
{
uint8_t Rec_Data[14];
int16_t temp;
// قراءة 14 بايت من البيانات بدءًا من مسجل ACCEL_XOUT_H
HAL_I2C_Mem_Read(I2Cx, MPU6050_ADDR, ACCEL_XOUT_H_REG, 1, Rec_Data, 14, i2c_timeout);
DataStruct->Accel_X_RAW = (int16_t)(Rec_Data[0] << 8 | Rec_Data[1]);
DataStruct->Accel_Y_RAW = (int16_t)(Rec_Data[2] << 8 | Rec_Data[3]);
DataStruct->Accel_Z_RAW = (int16_t)(Rec_Data[4] << 8 | Rec_Data[5]);
temp = (int16_t)(Rec_Data[6] << 8 | Rec_Data[7]);
DataStruct->Gyro_X_RAW = (int16_t)(Rec_Data[8] << 8 | Rec_Data[9]);
DataStruct->Gyro_Y_RAW = (int16_t)(Rec_Data[10] << 8 | Rec_Data[11]);
DataStruct->Gyro_Z_RAW = (int16_t)(Rec_Data[12] << 8 | Rec_Data[13]);
}
````arabic
يُرجى ترجمة النص إلى اللغة العربية:
```cpp
DataStruct->Ax = DataStruct->Accel_X_RAW / 16384.0;
DataStruct->Ay = DataStruct->Accel_Y_RAW / 16384.0;
DataStruct->Az = DataStruct->Accel_Z_RAW / Accel_Z_corrector;
DataStruct->Temperature = (float)((int16_t)temp / (float)340.0 + (float)36.53);
DataStruct->Gx = DataStruct->Gyro_X_RAW / 131.0;
DataStruct->Gy = DataStruct->Gyro_Y_RAW / 131.0;
DataStruct->Gz = DataStruct->Gyro_Z_RAW / 131.0;
// حل زاوية كالمان
double dt = (double)(HAL_GetTick() - timer) / 1000;
timer = HAL_GetTick();
double roll;
double roll_sqrt = sqrt(
DataStruct->Accel_X_RAW * DataStruct->Accel_X_RAW + DataStruct->Accel_Z_RAW * DataStruct->Accel_Z_RAW);
if (roll_sqrt != 0.0)
{
roll = atan(DataStruct->Accel_Y_RAW / roll_sqrt) * RAD_TO_DEG;
}
else
{
roll = 0.0;
}
double pitch = atan2(-DataStruct->Accel_X_RAW, DataStruct->Accel_Z_RAW) * RAD_TO_DEG;
if ((pitch < -90 && DataStruct->KalmanAngleY > 90) || (pitch > 90 && DataStruct->KalmanAngleY < -90))
{
KalmanY.angle = pitch;
DataStruct->KalmanAngleY = pitch;
}
else
{
DataStruct->KalmanAngleY = Kalman_getAngle(&KalmanY, pitch, DataStruct->Gy, dt);
}
if (fabs(DataStruct->KalmanAngleY) > 90)
DataStruct->Gx = -DataStruct->Gx;
DataStruct->KalmanAngleX = Kalman_getAngle(&KalmanX, roll, DataStruct->Gx, dt);
}
double Kalman_getAngle(Kalman_t *Kalman, double newAngle, double newRate, double dt)
{
double rate = newRate - Kalman->bias;
Kalman->angle += dt * rate;
```python
Kalman->P[0][0] += dt * (dt * Kalman->P[1][1] - Kalman->P[0][1] - Kalman->P[1][0] + Kalman->Q_angle);
Kalman->P[0][1] -= dt * Kalman->P[1][1];
Kalman->P[1][0] -= dt * Kalman->P[1][1];
Kalman->P[1][1] += Kalman->Q_bias * dt;
double S = Kalman->P[0][0] + Kalman->R_measure;
double K[2];
K[0] = Kalman->P[0][0] / S;
K[1] = Kalman->P[1][0] / S;
double y = newAngle - Kalman->angle;
Kalman->angle += K[0] * y;
Kalman->bias += K[1] * y;
double P00_temp = Kalman->P[0][0];
double P01_temp = Kalman->P[0][1];
Kalman->P[0][0] -= K[0] * P00_temp;
Kalman->P[0][1] -= K[0] * P01_temp;
Kalman->P[1][0] -= K[1] * P00_temp;
Kalman->P[1][1] -= K[1] * P01_temp;
return Kalman->angle;
};
````
يمكن رؤية أنه تمت إضافة `dt` إلى `Kalman->P[0][0]` بناءً على معادلات معينة. ثم تم تعديل قيم `Kalman->P[0][1]` و `Kalman->P[1][0]` و `Kalman->P[1][1]` بناءً على القيم الموجودة مسبقًا وبعض القيم الأخرى. تم حساب `S` و `K` استنادًا إلى القيم المحسوبة مسبقًا. تم حساب `y` باستخدام `newAngle` و `Kalman->angle` وتم تحديث `Kalman->angle` و `Kalman->bias` باستخدام `K` و `y`. تم حساب `P00_temp` و `P01_temp` بناءً على القيم السابقة، ثم تم تحديث `Kalman->P[0][0]` و `Kalman->P[0][1]` و `Kalman->P[1][0]` و `Kalman->P[1][1]` باستخدام هذه القيم. أخيرًا، تم إرجاع `Kalman->angle`.
````
يمكن رؤية أنه بعد تعيين عنوان I2C، تمت مراجعة المعلومات المسترجعة من MPU6050 في دالة `MPU6050_Read_All` في دورة while، وتم توفير فترة تأخير قبل مواصلة التنفيذ.
```markdown
```c
int16_t Accel_X_RAW;
int16_t Accel_Y_RAW;
int16_t Accel_Z_RAW;
double Ax;
double Ay;
double Az;
int16_t Gyro_X_RAW;
int16_t Gyro_Y_RAW;
int16_t Gyro_Z_RAW;
double Gx;
double Gy;
double Gz;
float Temperature;
double KalmanAngleX;
double KalmanAngleY;
} MPU6050_t;
````
بعد تكوين واجهة السلسلة، يمكنك إخراج المتغيرات باستخدام البيان التالي:
```c
printf("زاوية X: %.2f درجة\t", MPU6050.KalmanAngleX);
المراجع والشكر
عنوان النص: https://wiki-power.com/
يتم حماية هذا المقال بموجب اتفاقية CC BY-NC-SA 4.0، يُرجى ذكر المصدر عند إعادة النشر.