ZenDriver - Motor Driver de Alto Rendimiento
—— Basado en la versión V5.1 Release
Repositorio del proyecto: linyuxuanlin/ZenDriver
Especificaciones Básicas
- Voltaje de Entrada: 7.2 ~ 20 V
- Corriente de Salida: 0 ~ 68 A
- Ofrece una salida de 5V 1.5A para alimentar el controlador
- Dispositivos de Protección: Integrados con circuitos de protección contra inversión de polaridad y aislamiento óptico
Definición de Interfaces
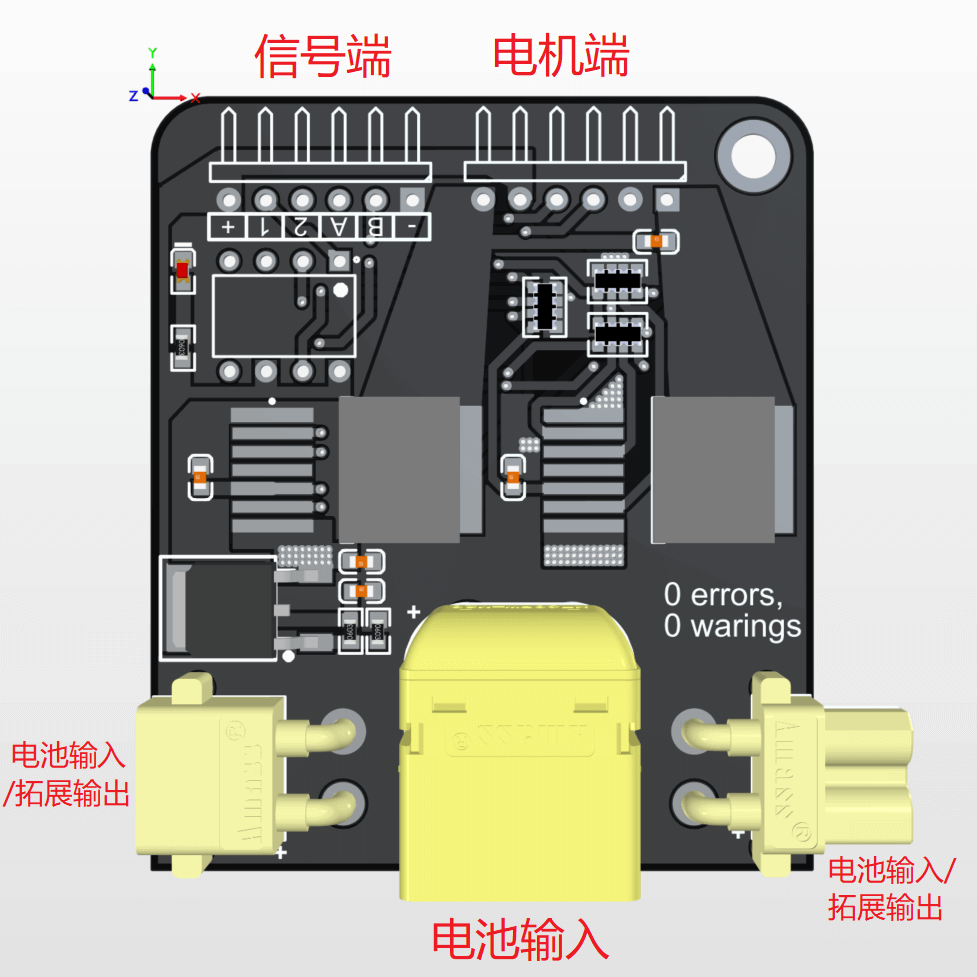
Los pines en el lado del motor de izquierda a derecha son: M-, 5V, Encoder A, Encoder B, GND, M+, correspondientes a los pines del motor y pueden conectarse directamente al motor.
Los pines en el lado de señal de derecha a izquierda son: GND, Encoder B, Encoder A, IN2, IN1, 5V. Nota: el puerto de 5V puede suministrar energía al microcontrolador (hasta 1.5 A).
Los tres puertos en el lado de entrada de alimentación son comunes, generalmente se recomienda conectar la batería al puerto del medio, y los dos puertos adyacentes se utilizan para proporcionar energía a otras placas de control.
Guía de Uso
Prueba de Alimentación Directa
- Conecte una batería de 7.2 ~ 20 V como fuente de alimentación.
- Conecte el motor.
- Conecte 5V en el lado de señal a IN1 e IN2, en este momento, el motor girará en ambas direcciones.
Conexión para Pruebas con un Microcontrolador
- Conecte una batería de 7.2 ~ 20 V como fuente de alimentación.
- Conecte el motor.
- Conecte GND del lado de señal al GND del microcontrolador, y el puerto 5V al 5V del microcontrolador.
- Los pines IN1 e IN2 deben conectarse a los pines PWM del microcontrolador.
- Depure mediante código.
Dirección original del artículo: https://wiki-power.com/ Este artículo está protegido por la licencia CC BY-NC-SA 4.0. Si desea reproducirlo, por favor indique la fuente.
Este post está traducido usando ChatGPT, por favor feedback si hay alguna omisión.